નેમા 23 (57mm) બંધ-લૂપ સ્ટેપર મોટર્સ

>> ટૂંકા વર્ણનો
| મોટરનો પ્રકાર | બાયપોલર સ્ટેપર |
| સ્ટેપ એંગલ | 1.8° |
| વોલ્ટેજ (V) | 2.6 / 3.6 / 4.1 |
| વર્તમાન (A) | 3/4/5 |
| પ્રતિકાર (ઓહ્મ) | 0.86 / 0.9 / 0.81 |
| ઇન્ડક્ટન્સ (mH) | 2.6 / 4.5 / 4.6 |
| લીડ વાયર | 4 |
| હોલ્ડિંગ ટોર્ક (Nm) | 1 / 1.8 / 3 |
| મોટર લંબાઈ (mm) | 55/75/112 |
| એન્કોડર | 1000CPR |
| આસપાસનું તાપમાન | -20℃ ~ +50℃ |
| તાપમાનમાં વધારો | 80K મહત્તમ. |
| ડાઇલેક્ટ્રિક સ્ટ્રેન્થ | 1mA મહત્તમ.@ 500V, 1KHz, 1Sec. |
| ઇન્સ્યુલેશન પ્રતિકાર | 100MΩ મિનિટ@500Vdc |
>> વર્ણનો
Pકામગીરી
મોટી લોડ ક્ષમતા, નીચા તાપમાનમાં વધારો, નાનું કંપન, ઓછો અવાજ, ઝડપી ગતિ, ઝડપી પ્રતિભાવ, સરળ કામગીરી, લાંબુ જીવન, ઉચ્ચ સ્થિતિની ચોકસાઈ (±0.005mm સુધી)
Aઅરજી
મેડિકલ ડાયગ્નોસ્ટિક ઇક્વિપમેન્ટ, લાઇફ સાયન્સ ઇન્સ્ટ્રુમેન્ટ્સ, રોબોટ્સ, લેસર ઇક્વિપમેન્ટ, એનાલિટિકલ ઇન્સ્ટ્રુમેન્ટ્સ, સેમિકન્ડક્ટર ઇક્વિપમેન્ટ, ઇલેક્ટ્રોનિક પ્રોડક્શન ઇક્વિપમેન્ટ, નોન-સ્ટાન્ડર્ડ ઓટોમેશન ઇક્વિપમેન્ટ અને વિવિધ પ્રકારના ઓટોમેશન ઇક્વિપમેન્ટ
>> પ્રમાણપત્રો

>> વિદ્યુત પરિમાણો
| મોટરનું કદ | વિદ્યુત્સ્થીતિમાન/ તબક્કો (વી) | વર્તમાન/ તબક્કો (A) | પ્રતિકાર/ તબક્કો (Ω) | ઇન્ડક્ટન્સ/ તબક્કો (mH) | સંખ્યા લીડ વાયર | રોટર જડતા (g.cm2) | ટોર્ક હોલ્ડિંગ (Nm) | મોટરની લંબાઈ એલ (મીમી) |
| 57 | 2.6 | 3 | 0.86 | 2.6 | 4 | 300 | 1 | 55 |
| 57 | 3.6 | 4 | 0.9 | 4.5 | 4 | 480 | 1.8 | 75 |
| 57 | 4.1 | 5 | 0.81 | 4.6 | 4 | 800 | 3 | 112 |
>> સામાન્ય તકનીકી પરિમાણો
| રેડિયલ ક્લિયરન્સ | 0.02 મીમી મહત્તમ (450 ગ્રામ લોડ) | ઇન્સ્યુલેશન પ્રતિકાર | 100MΩ @500VDC |
| અક્ષીય ક્લિયરન્સ | 0.08 મીમી મહત્તમ (450 ગ્રામ લોડ) | ડાઇલેક્ટ્રિક તાકાત | 500VAC, 1mA, 1s@1KHZ |
| મહત્તમ રેડિયલ લોડ | 70N (ફ્લાંજ સપાટીથી 20 મીમી) | ઇન્સ્યુલેશન વર્ગ | વર્ગ B (80K) |
| મહત્તમ અક્ષીય ભાર | 15એન | આસપાસનું તાપમાન | -20℃ ~ +50℃ |
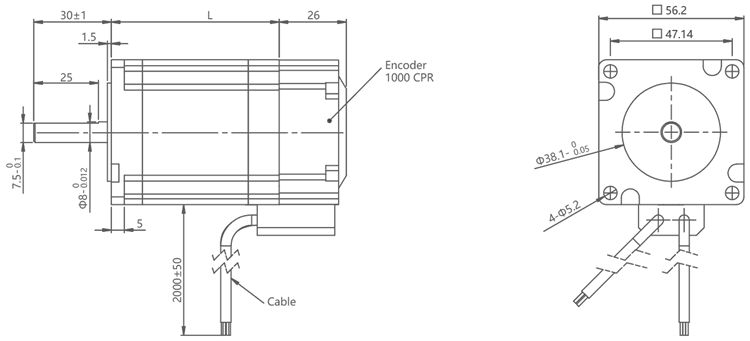
>> 57IHS2XX-X-4A મોટર રૂપરેખા રેખાંકન
| પિન રૂપરેખાંકન (વિભેદક) | ||
| પિન | વર્ણન | રંગ |
| 1 | +5 વી | લાલ |
| 2 | જીએનડી | સફેદ |
| 3 | A+ | કાળો |
| 4 | A- | વાદળી |
| 5 | B+ | પીળો |
| 6 | B- | લીલા |





